服務(wù)熱線
86-0769-83110798

民用多旋翼無人機(jī)的抗風(fēng)測試方法通過標(biāo)準(zhǔn)化流程和jian端設(shè)備,實(shí)現(xiàn)對無人機(jī)在復(fù)雜風(fēng)場中穩(wěn)定性、操控性和安全性的量化評估。以下是核心測試方法及技術(shù)細(xì)節(jié)的深度解析:
一、可控風(fēng)場測試:精準(zhǔn)復(fù)現(xiàn)自然風(fēng)況
由Delta德爾塔儀器聯(lián)合電子科技大學(xué)(深圳)高等研究院——深思實(shí)驗(yàn)室團(tuán)隊(duì)、工信部電子五所賽寶低空通航實(shí)驗(yàn)室研發(fā)制造的無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置,正成為解決無人機(jī)行業(yè)抗風(fēng)性能測試難題的突破性技術(shù)。
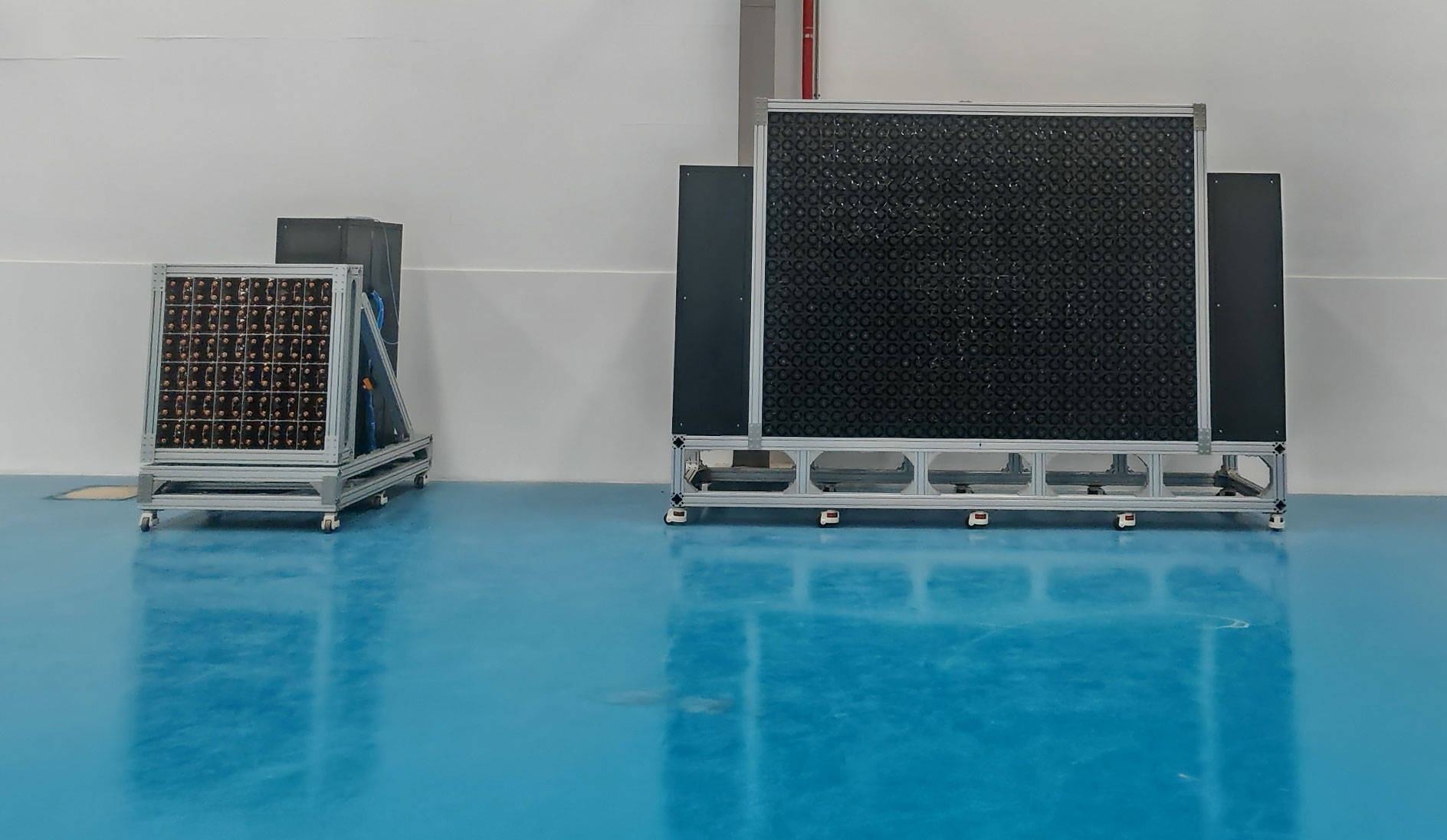

無人機(jī)風(fēng)墻測試系統(tǒng)\無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置
1. 抗風(fēng)測試風(fēng)墻技術(shù)
作為當(dāng)前主流測試手段,風(fēng)墻系統(tǒng)通過矩陣式風(fēng)機(jī)陣列構(gòu)建開放式人造風(fēng)場,可精準(zhǔn)模擬 0-35m/s(0-15 級風(fēng))的風(fēng)速范圍,并實(shí)現(xiàn) 0°-360° 任意風(fēng)向調(diào)節(jié)。其核心優(yōu)勢體現(xiàn)在:
動態(tài)風(fēng)況模擬:支持 5 秒內(nèi)風(fēng)速從 5m/s 驟升至 20m/s 的陣風(fēng)測試,同步復(fù)現(xiàn)垂直風(fēng)切變(5m/s/10m 高度差)、城市峽谷風(fēng)等復(fù)雜氣流形態(tài)。例如,Delta 德爾塔儀器研發(fā)的風(fēng)墻系統(tǒng)通過 48 個獨(dú)立風(fēng)機(jī)模塊,將風(fēng)場均勻度誤差控制在 ±5% 以內(nèi),湍流強(qiáng)度可在 5%-30% 區(qū)間精準(zhǔn)調(diào)控。
全維度數(shù)據(jù)采集:集成超聲波風(fēng)速儀、六軸加速度傳感器、高速相機(jī)(200 幀 / 秒)等設(shè)備,同步監(jiān)測無人機(jī)姿態(tài)角偏差(精度 ±0.3°)、電機(jī)轉(zhuǎn)速波動、電池能耗等核心參數(shù),生成 “風(fēng)速 - 響應(yīng)" 關(guān)系曲線。某植保無人機(jī)通過該系統(tǒng)發(fā)現(xiàn),風(fēng)速超過 10m/s 時(shí)電池能耗增加 30%,為動力系統(tǒng)優(yōu)化提供了關(guān)鍵依據(jù)。
場景適應(yīng)性:開放式結(jié)構(gòu)突破尺寸限制,可測試翼展數(shù)米的中大型無人機(jī),且測試成本較傳統(tǒng)風(fēng)洞降低 60% 以上。
2. 風(fēng)洞測試技術(shù)
傳統(tǒng)管狀風(fēng)洞適用于部件級測試(如槳葉氣動性能),其測試流程包括:
穩(wěn)態(tài)風(fēng)測試:在固定風(fēng)速(如 6 級風(fēng) 10.8-13.8m/s)下評估懸停穩(wěn)定性,要求水平偏移≤0.5 米,姿態(tài)波動≤0.3°。
動態(tài)響應(yīng)測試:通過正弦波風(fēng)或階躍陣風(fēng)模擬自然風(fēng)擾動,測試飛控系統(tǒng)的瞬時(shí)修正能力,合格標(biāo)準(zhǔn)為 0.3 秒內(nèi)恢復(fù)穩(wěn)定。
二、自然風(fēng)場測試:驗(yàn)證真實(shí)環(huán)境適應(yīng)性
在符合安全規(guī)范的開闊場地(如海邊、平原)進(jìn)行實(shí)飛測試,重點(diǎn)驗(yàn)證以下場景:
持續(xù)風(fēng)測試:選擇穩(wěn)定風(fēng)速環(huán)境(如 5 級風(fēng) 8.0-10.7m/s),記錄 30 分鐘內(nèi)的航線偏移、姿態(tài)角變化及動力系統(tǒng)負(fù)載。
陣風(fēng)測試:利用氣象預(yù)報(bào)捕捉突發(fā)陣風(fēng)(如風(fēng)速驟升 15m/s),評估無人機(jī)的應(yīng)急響應(yīng)能力,要求自動返航落點(diǎn)誤差≤5 米。
復(fù)雜地形測試:在山區(qū)、城市建筑群等易產(chǎn)生湍流的區(qū)域,測試無人機(jī)穿越風(fēng)切變時(shí)的軌跡保持能力,需通過激光雷達(dá)或 RTK 實(shí)時(shí)監(jiān)測位置精度。
該方法的局限性在于風(fēng)況不可控,通常作為實(shí)驗(yàn)室測試的補(bǔ)充手段。例如,某物流無人機(jī)在峽谷風(fēng)場測試中,通過優(yōu)化飛控算法將側(cè)風(fēng)偏移量從 2 米降低至 0.8 米。
三、動態(tài)模擬測試:多維度壓力驗(yàn)證
1. 多工況組合測試
復(fù)合環(huán)境測試:在風(fēng)墻系統(tǒng)中疊加溫濕度(-20℃~50℃)、沙塵等環(huán)境因素,驗(yàn)證ji端條件下的綜合抗風(fēng)性能。例如,某電力巡檢無人機(jī)在 - 10℃、6 級風(fēng)環(huán)境中,電池續(xù)航衰減控制在 15% 以內(nèi)。
多機(jī)協(xié)同測試:通過多臺風(fēng)機(jī)模塊生成交叉氣流,模擬多旋翼間的氣動干擾,評估編隊(duì)飛行時(shí)的穩(wěn)定性。
2. 極限載荷測試
結(jié)構(gòu)強(qiáng)度驗(yàn)證:在 1.5 倍目標(biāo)風(fēng)速下持續(xù)運(yùn)行 30 分鐘,要求機(jī)身無變形、電機(jī)支架無松動,安全系數(shù)≥1.2。
動力冗余測試:模擬單電機(jī)失效場景,測試剩余電機(jī)在強(qiáng)風(fēng)下的補(bǔ)償能力,需保持航向偏差≤5°。
四、標(biāo)準(zhǔn)框架下的測試流程
依據(jù) GB/T 38058-2019、GB42590-2023 等國家標(biāo)準(zhǔn),測試需遵循以下規(guī)范:
測試預(yù)處理:
設(shè)備校準(zhǔn):對風(fēng)速傳感器、姿態(tài)記錄儀進(jìn)行零點(diǎn)校準(zhǔn),誤差需≤±2%。
方案設(shè)計(jì):根據(jù)無人機(jī)類型制定差異化測試方案,如消費(fèi)級需完成 7 級陣風(fēng)循環(huán)測試,工業(yè)級需追加垂直風(fēng)切變場景。
測試實(shí)施:
持續(xù)風(fēng)測試:按預(yù)設(shè)風(fēng)速穩(wěn)定輸出 30 分鐘,同步采集位置、姿態(tài)、動力數(shù)據(jù)。
陣風(fēng)測試:執(zhí)行 10 次風(fēng)速躍升循環(huán),每次躍升時(shí)間≤5 秒,記錄無人機(jī)的響應(yīng)延遲與修正幅度。
結(jié)果判定:
核心指標(biāo):電機(jī)溫度≤80℃、水平定位精度≤2m(RMS)、自動返航誤差≤5m(RMS)等。
失效處理:若出現(xiàn)姿態(tài)失控或動力過載,需返回研發(fā)環(huán)節(jié)優(yōu)化結(jié)構(gòu)或算法,重新測試。
五、技術(shù)創(chuàng)新與未來趨勢
AI 驅(qū)動測試:通過機(jī)器學(xué)習(xí)預(yù)測無人機(jī)對動態(tài)風(fēng)場的響應(yīng),實(shí)現(xiàn) “風(fēng)隨機(jī)動" 的智能交互測試,將測試周期縮短 60% 以上。
數(shù)字孿生技術(shù):構(gòu)建無人機(jī)虛擬模型,在數(shù)字空間中模擬ji端風(fēng)況,提前優(yōu)化設(shè)計(jì)參數(shù),降低實(shí)體測試成本。
多模態(tài)融合測試:集成視覺、慣性、氣壓等多傳感器數(shù)據(jù),實(shí)現(xiàn)無 GPS 環(huán)境下的抗風(fēng)性能評估,適用于室內(nèi)或復(fù)雜地形場景。
從消費(fèi)級航拍器到工業(yè)級巡檢平臺,抗風(fēng)測試方法的演進(jìn)始終圍繞 “精準(zhǔn)性、真實(shí)性、經(jīng)濟(jì)性" 展開。通過實(shí)驗(yàn)室模擬與外場驗(yàn)證的有機(jī)結(jié)合,這些測試手段不僅筑牢了無人機(jī)飛行的安全底線,更為其在應(yīng)急救援、低空物流等場景的規(guī)模化應(yīng)用提供了堅(jiān)實(shí)技術(shù)支撐。
聯(lián)系方式
郵件:gaoshengkeji@163.com